이 문제는 며칠 동안 나를 괴롭 히고 있으므로 도움을 청하기로 결정했습니다.복합 쿼터니언의 유도에 관하여
저는 Jack B. Kuipers가 쓴 책 "Quaternions and Rotation Sequence"를 읽었습니다. 6.4 절에서 저자는 복합 회전 쿼터니언의 수식을 도출합니다. 이 유도의 단계 중 하나는 나를 이해하기가 어렵습니다.
나는 간단히 다음과 같이 유도 과정을 설명하고 싶습니다 :
가 this picture 같이 추적 문제를 고려합니다.
{kind=link}
사진에서
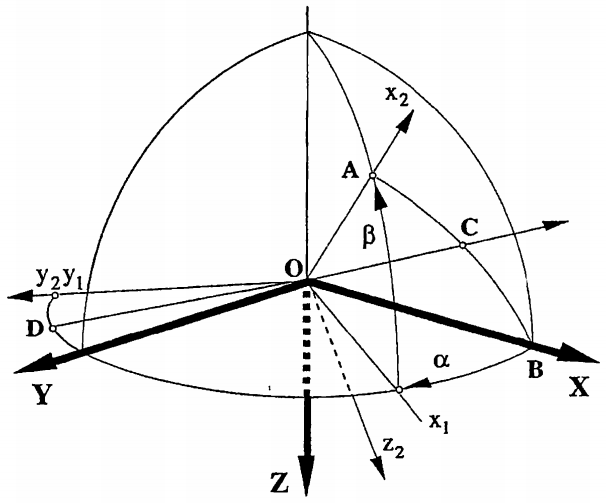
(나는 이것이 내가 이렇게 아직 할 자격이 아니다 그래서 여기에 질문을 게시 처음이기 때문에 직접 사진을 게시 대신에 링크를 사용할 필요가 미안), XYZ는이다 글로벌, 참조 프레임. 2 연속 회전이 수행됩니다. 첫 번째는 각도 α를 통해 Z 축을 중심으로 회전하고 프레임 XYZ를 새 프레임 x1y1z1로 변형합니다. 두 번째 것은 y1 축을 중심으로 각도 베타로 x1y1z1 프레임을 새로운 프레임 x2y2z2로 변환하는 회전입니다.
목표는 위의 두 회전과 동일한 단일 합성 회전 쿼터니언을 찾는 것입니다.
저자는 다음과 같이합니다. 첫 번째 회전은 다음 쿼터니온 (P)로 표현 될 수있다 :
p = COS (알파/2) +는 K *이 죄 (알파/2) (1)
식 중, K이다표준 기저 벡터 (우리는 축 x, y, z에 각각 대응하는 R3의 벡터 i, j, k을 갖는다).
번째 회전은 다음 쿼터니온 (Q)으로 표현 될 수있다 :
Q = COS (베타/2) + J * 죄 (베타/2) (2)
복합 쿼터니언 우리에게 찾고있는 것은이 2 쿼터니언의 산물이다 : qp. 이 제품의 공식은 this picture입니다. 마지막 수식을 도출하기 위해
{kind=link}
은 저자 표준 기저 벡터 약 2 개 가정을 사용 I이다 J, K : KJ = 0 K X J = - . 그리고 이것은 내가 이해하지 못하는 곳입니다.
우리는 모두 알고 3- 서로 직교 벡터 I, J, K는 이러한 두 가정은 상기 올바른지의 세트. 그러나 (1)의 벡터 k 및 (2)의 벡터 j은 같은 좌표 프레임에 속하지 않습니다.즉, (1)의 k은 프레임 XYZ의 Z에 대응하고, (2)의 j은 x1y1z1의 y1에 대응한다. 그리고 이것들은 2 개의 서로 다른 프레임을 구별하기 때문에 저자가 사용한 두 번째 가정은 틀린 것 같습니다.
이 점에 대해 어떻게 생각하십니까? 어떤 대답이라도 감사 할 것입니다. 고맙습니다.
이 질문은 StackOverflow가 아니라 [Math.SE] (http://math.stackexchange.com/)에 대한 것입니다. – Blender